





















Όλα τα Προϊόντα
-
Πολυλειτουργική χειροκίνητη υπέρυθρη νυχτερινή όραση
-
Ρομπότ απομάκρυνσης εκρηκτικών όπλων
-
Μικροσκοπικό ρομπότ αναγνώρισης
-
Μονοκοιλιακή ψηφιακή νυχτερινή όραση
-
Ψηφιακή συσκευή νυχτερινής όρασης
-
Αντι-Σνάιπερ
-
Φορητό ραντάρ
-
Φανάρι καταγραφής περιπολίας
-
Τακτικό εξοπλισμό ειδικών επιχειρήσεων
-
Πεδίο τουφεκιών
-
Αποστασιόμετρο λέιζερ
-
Στρατιωτικό μοντέλο
-
τακτικό εξοπλισμό
-
Φουσκωτά δόλωματα
Ελαφρύ εκρηκτικό πυρομαχικό EOD Robots Hound-I






| Τόπος καταγωγής | Κίνα |
|---|---|
| Μάρκα | Particle |
| Αριθμό μοντέλου | REOD400 |
| Τιμή | $102,881 |
| Όροι πληρωμής | Τ/Τ |

Με ελάτε σε επαφή με δωρεάν δείγματα και δελτία.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Εάν έχετε οποιαδήποτε ανησυχία, παρέχουμε τη 24ωρη σε απευθείας σύνδεση βοήθεια.
xΛεπτομέρειες
| μέγεθος | ≤ 830 mm × 600 mm × 460 mm ((Πλήρως σκεπασμένο) | Βάρος | ≤ 37kg ((Σε δύο σετ μπαταριών) |
|---|---|---|---|
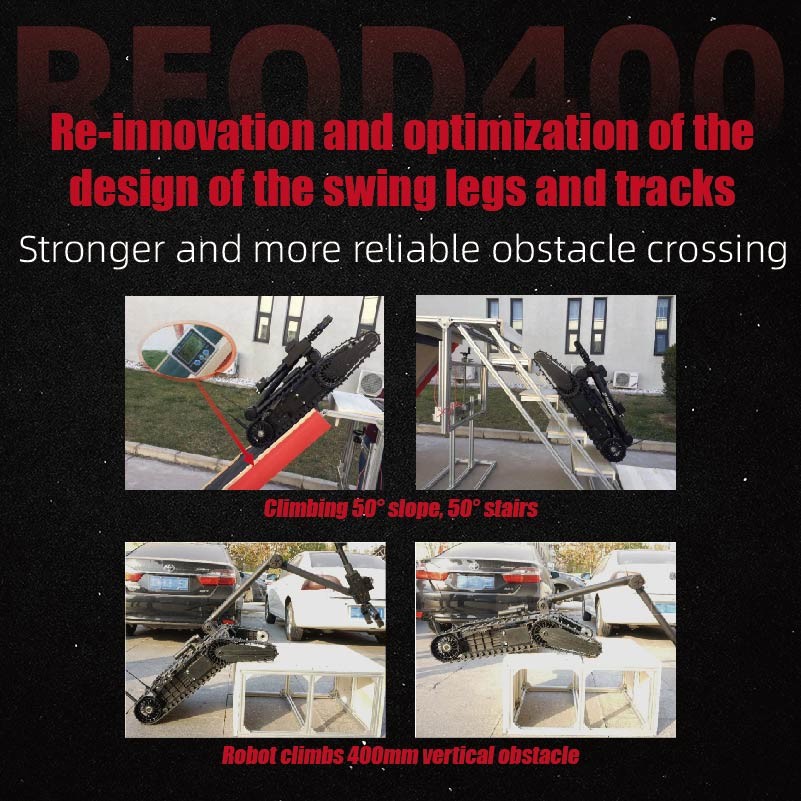
| Πάνω από την Ικανότητα Εμποδίου | ≥300mm | Πέρα από το πλάτος του αυλαίου | ≥400MM |
| Δυνατότητα κατάταξης | ≥45° | Ανέβασε σκάλες | ≥45° |
| Μετακινούμενες αρθρώσεις | 8 | Μακρύτερη απόσταση άρσης | ≥ 1650 mm |
| Μέγιστο πλάτος ανοίγματος της λαβής | ≥160mm | Ικανότητα ανελκυστήρων | 6-16 κιλά |
| Μέθοδος λειτουργίας | Δύο λειτουργίες λειτουργίας του κουμπιού και της οθόνης αφής | Μέθοδος ελέγχου | Διοίκηση με καλώδιο ≥ 100m ((Κανονικό καλώδιο),Ασύρματο έλεγχο ≥ 1000m ((Εξωτερικό) |
| Διάρκεια ζωής της μπαταρίας (φυσιολογική θερμοκρασία) | ≥2H | Αξία IP | Διάκριση IP66 |
| Επισημαίνω | Ρομπότ σκύλου,Ρομπότ απομάκρυνσης εκρηκτικών όπλων,Ελαφρύ ρομπότ eod |
||
Περιγραφή προϊόντων
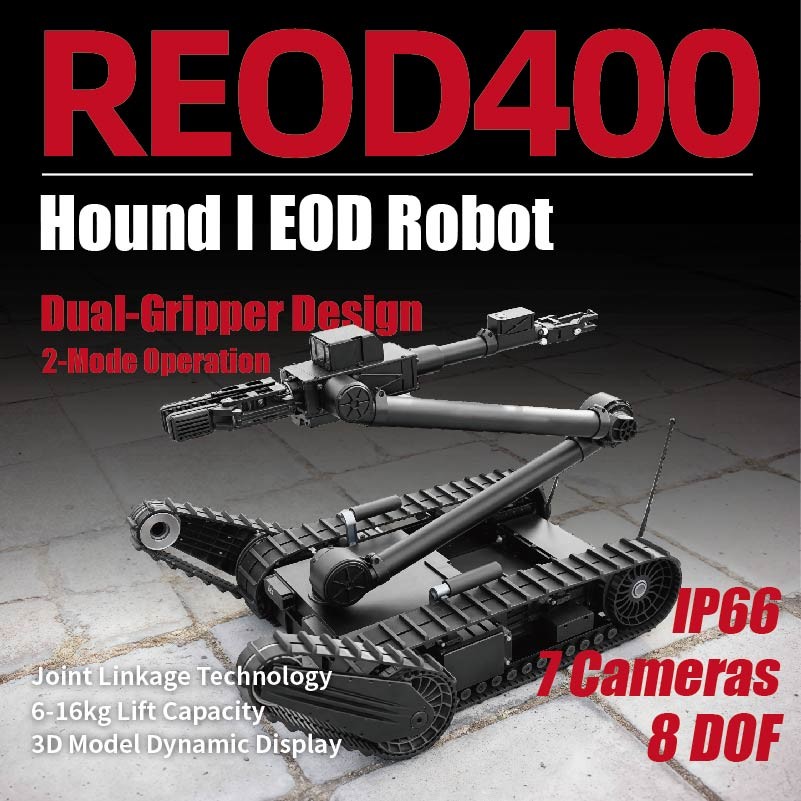
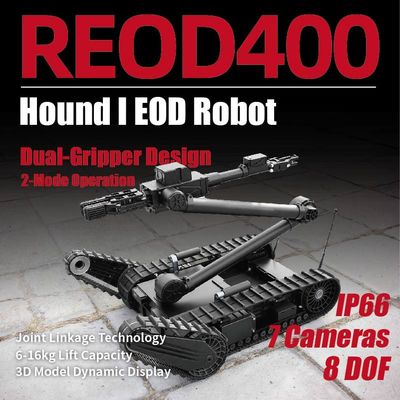
Ρομπότ EOD για την απομάκρυνση ελαφρών εκρηκτικών πυρομαχικών Hound-I
Περιγραφή και χαρακτηριστικά
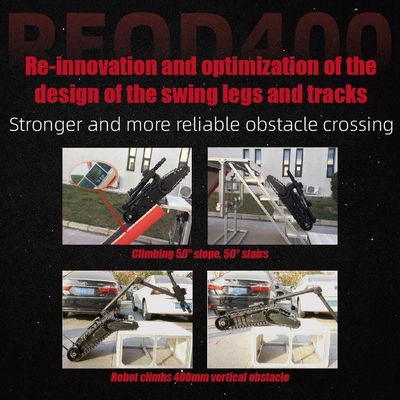
Το ρομπότ REOD400 EOD είναι μια προηγμένη λύση για την απομάκρυνση εκρηκτικών όπλων (EOD) σε περιβάλλοντα υψηλού κινδύνου.το οποίο το καθιστά εξαιρετικά αποτελεσματικό για επιχειρήσεις όπως η αστική αντιτρομοκρατίαΤο ρομπότ είναι συμπαγές και ελαφρύ, με διαστάσεις ≤ 830 mm × 600 mm × 460 mm (πλήρως αποθηκευμένο) και βάρος ≤ 37 kg.Έχει μέγιστη ταχύτητα ≥ 1.8m/s με 5 ταχύτητες και συνεχώς μεταβλητή κίνηση, απόσταση από εμπόδια ≥ 300 mm και δυνατότητα κλιμάκωσης και ανέλιξης μέχρι 45°,διασφάλιση ανώτερης ελιγμότητας και προσαρμοστικότητας σε διάφορα εδάφη.
Εξοπλισμένο με 8 μοίρες ελευθερίαςΧειραγωγός, το REOD400 προσφέρει ακριβή χειρισμό με μέγιστο ύψος λαβής ≥ 1700 mm (κυριότερη νύχια) και μακρύτερη απόσταση λαβής ≥ 1380 mm (κυριότερη νύχια).να επιτρέπουν πλουσιότερες προοπτικές παρατήρησηςΜε διάρκεια ζωής μπαταρίας ≥ 2 ώρες σε κανονική θερμοκρασία, βαθμολογία IP66 για αντοχή στη σκόνη και στο νερό,και μεθόδους ελέγχου που περιλαμβάνουν έλεγχο καλωδίων έως 100m και έλεγχο ασύρματων έως 1000mΕπιπλέον, προσφέρει επιλογές προσαρμογής OEM και ODM για την κάλυψη συγκεκριμένων επιχειρησιακών αναγκών.
Καινοτόμο σχεδιασμό "διπλής λαβής" ∙ βελτίωση της ευελιξίας και της εφικτότητας στην εκτέλεση των εργασιών
Ο καινοτόμος σχεδιασμός "Dual Gripper" διαθέτει ένα ρομποτικό χέρι εξοπλισμένο τόσο με ένα "πρωταρχικό λαβή" όσο και με ένα "πολυλειτουργικό παράταση λαβή".Αυτή η σχεδίαση βελτιώνει σημαντικά την ευελιξία και την εφικτότητα του ρομπότ στην εκτέλεση εργασιών, παρέχοντας αποτελεσματική υποστήριξη για την ολοκλήρωση μιας ποικιλίας καθηκόντων σε μία μόνο πράξη.Το σχέδιο "Δύο λαβήματα" αντιμετωπίζει αποτελεσματικά τους περιορισμούς των παραδοσιακών ρομπότ απορρίψεως βόμβων που έχουν μόνο ένα "μονό λαβήματα"," η οποία δεν μπορεί ταυτόχρονα να εκτελέσει εργασίες όπως η "συντήρηση επικίνδυνων αντικειμένων" και η "άνοιξη θυρών, το κόψιμο, το σφίξιμο, το κόψιμο, το άνοιγμα και άλλες βοηθητικές ενέργειες".Μπορεί να επιτύχει εργασίες όπως το "ανοίξει μια πόρτα και να αρπάξει ένα αντικείμενο σε μια φορά". "
Ο σχεδιασμός "Dual Gripper" απελευθερώνει με επιτυχία το "πρωταρχικό νύχια λαβής" από την ανάγκη να εκτελεί άλλες λειτουργίες εκτός από τη λαβή, βελτιώνοντας έτσι σημαντικά τις δυνατότητες λαβής του ρομπότ.Το κύριο νύχι μπορεί να πιάσει ύποπτα επικίνδυνα αντικείμενα που ζυγίζουν 6-16 κιλά, με πλάτος λαβής έως 160 mm και μέγιστη δύναμη δέσμευσης 300 N. Επιπλέον, ανάλογα με τα συγκεκριμένα λειτουργικά καθήκοντα,το "σύνολο εργαλείων λαβής" μπορεί να αντικατασταθεί γρήγορα για να χειρίζεται διαφορετικούς τύπους και σχήματα επικίνδυνων αντικειμένων.
Υποστήριξη ελέγχου αφής / joystick ̇ Περισσότερη φιλική προς το χρήστη αλληλεπίδραση και αξιόπιστη λειτουργία
Ο σχεδιασμός λειτουργίας χειρισμού με γραφικό άγγιγμα / joystick είναι επί του παρόντος μια κορυφαία λύση ελέγχου ρομπότ απομάκρυνσης βόμβων διεθνώς.Έχει αναγνωριστεί ιδιαίτερα από τους χρήστες για την πιο φιλική προς το χρήστη αλληλεπίδραση και την αξιόπιστη λειτουργίαΤα κύρια χαρακτηριστικά της είναι τα εξής:
- Σχεδιασμός γραφικής λειτουργίας:Όλες οι λειτουργίες είναι σχεδιασμένες με γραφικό τρόπο, εξαλείφοντας την ανάγκη των χρηστών να απομνημονεύουν σύνθετες λειτουργίες κουμπιών και λειτουργικά πρωτόκολλα.Αυτή η φιλική προς το χρήστη διεπαφή καθιστά τη λειτουργία απλή και διαισθητική, μειώνοντας σημαντικά το χρόνο κατάρτισης.
- Σχεδιασμός λειτουργίας χειρισμού αφής / χαρτοπαλατιού:Τόσο τα κουμπιά του joystick όσο και μια οθόνη αφής μπορούν να χρησιμοποιηθούν για την εκτέλεση όλων των λειτουργιών του ρομπότ.Η περιττή λειτουργία που παρέχονται από αυτές τις δύο μεθόδους λειτουργίας όχι μόνο βελτιώνει την αξιοπιστία του συστήματος, αλλά επίσης βελτιώνει την λειτουργική αποτελεσματικότητα με τον συνδυασμό των κουμπιών joystick με τα χειριστήρια της οθόνης αφής.
|
|
Απομακρυσμένη 3D οθόνη σε πραγματικό χρόνο ️ Κοντά στο χέρι, πιο διαισθητική λειτουργία
Δεδομένου ότι τα ρομπότ εξόντωσης βόμβων συχνά λειτουργούν πέρα από την οπτική γραμμή κατά τη διάρκεια των αποστολών, οι πληροφορίες σε πραγματικό χρόνο σχετικά με τις γωνίες και τις χωρικές θέσεις των αρθρώσεων του ρομπότ είναι ζωτικής σημασίας για τους χειριστές. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusΑυτό κάνει το ρομπότ να αισθάνεται "κοντά στο χέρι" ακόμη και όταν είναι "μακριά", επιτρέποντας μια πιο διαισθητική λειτουργία.
Τα κύρια χαρακτηριστικά της απομακρυσμένης 3D οθόνης σε πραγματικό χρόνο είναι τα εξής:
- Παρουσίαση σε πραγματικό χρόνο της 3D κατάστασης του ρομπότ
- Παρατήρηση της 3D κατάστασης του ρομπότ από διάφορες γωνίες
- Μεγέθυνση και απόκλιση της 3D κατάστασης του ρομπότ
Ο χειροκίνητος ελεγκτής του ρομπότ αναπαράγει την απομακρυσμένη 3D κατάσταση του ρομπότ, επιτρέποντας στο 3D μοντέλο να μεγεθύνεται, να μεγεθύνεται και να παρατηρείται από οποιαδήποτε γωνία.
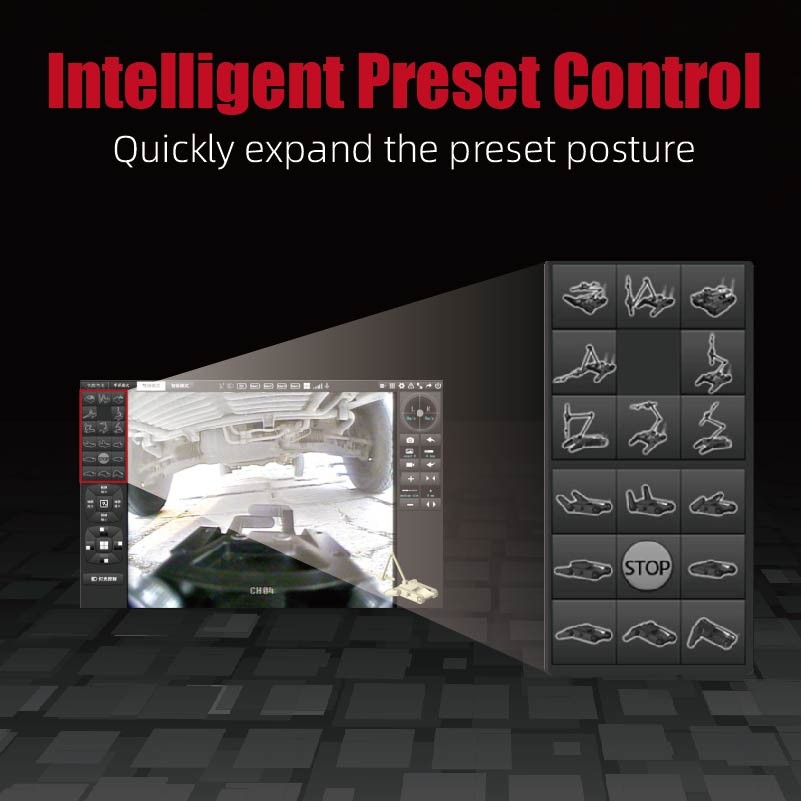
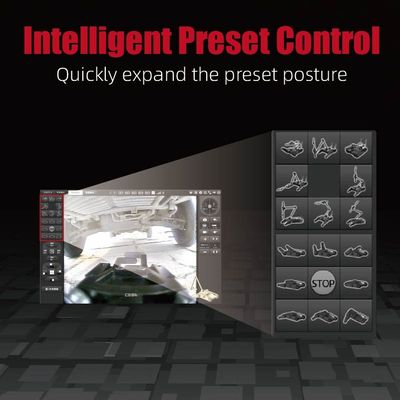
Διανοητικός σχεδιασμός ελέγχου στάσης προεπιλεγμένης στάσης ∙ Απλούστερη και ταχύτερη λειτουργία
Με το "Εξυπνό Ελέγχου Προεπιλεγμένης Στερέωσης για Συνηθισμένες Δουλειές", το ρομπότ μπορεί "να φτάσει αυτόματα σε μια προεπιλεγμένη θέση με ένα κλικ" με βάση τις ανάγκες του χρήστη.Αυτό το χαρακτηριστικό μειώνει σημαντικά την ποσότητα της χειροκίνητης λειτουργίας που απαιτείται επί τόπου, που λειτουργεί ως αποτελεσματικός βοηθός για τους χειριστές πρώτης γραμμής και ενισχύει την αξιοπιστία και την ασφάλεια των εργασιών διάθεσης βομβών.
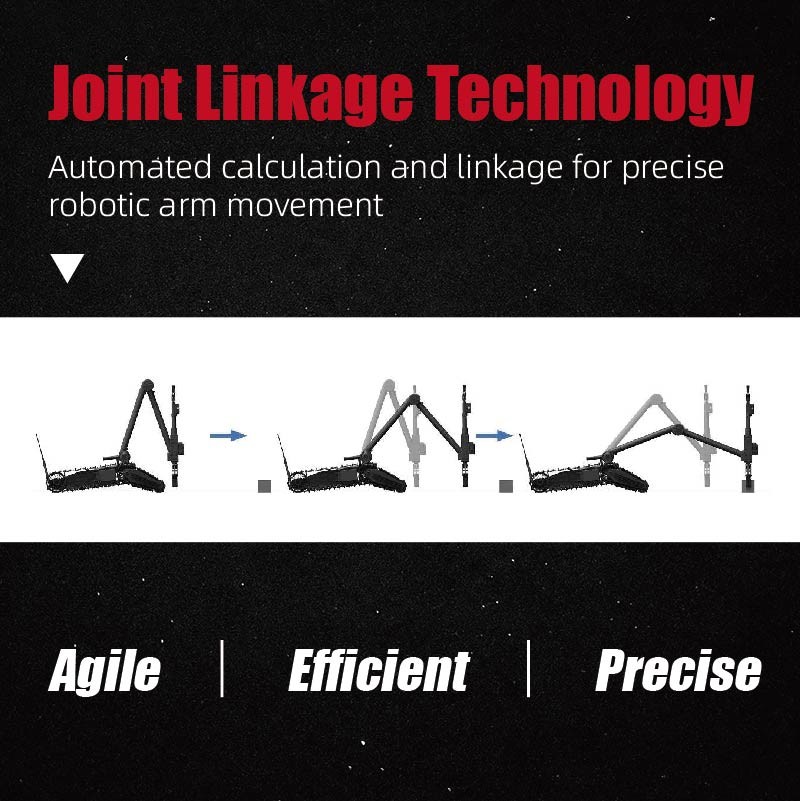
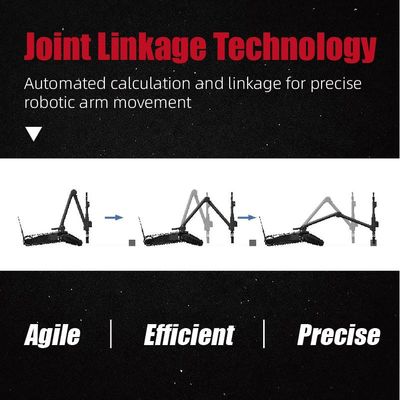
Τεχνολογία σύνδεσης αρθρώσεων "X-Y-Z" ∙ Πιο ακριβής και αποτελεσματικός έλεγχος
Ο σχεδιασμός λειτουργίας της τεχνολογίας σύνδεσης αρθρώσεων X-Y-Z, βασισμένος σε αυτόματο υπολογισμό, γνωστός επίσης ως "σχεδιασμός ελέγχου μετατροπής λαβής με βάση τις καρτεσιανές συντεταγμένες",Μεταμορφώνει τον παραδοσιακό έλεγχο των ρομπότ απομάκρυνσης βόμβων με "πολλαπλές αρθρώσεις"Αυτό βελτιώνει σημαντικά τη λειτουργική αποτελεσματικότητα και την ακρίβεια των ρομπότ απορρόφησης βομβών.
Το REOD400 επιτυγχάνει "καρτεσιανό συντεταγμένο βασισμένο έλεγχο μετάφρασης λαβής" μέσω αυτόματου υπολογισμού.Ελέγχει γρήγορα το ρομπότ για να επιτύχει "πολυαρθρωτική συντονισμένη κίνηση" για μονοδιάστατη μετάφραση διαστημικής λαβήςΑυτό μειώνει σημαντικά τη δυσκολία λειτουργίας και αυξάνει την ακρίβεια, επιτρέποντας σχεδόν άμεση τοποθέτηση χωρίς την ανάγκη επαναλαμβανόμενων επαναλήψεων.
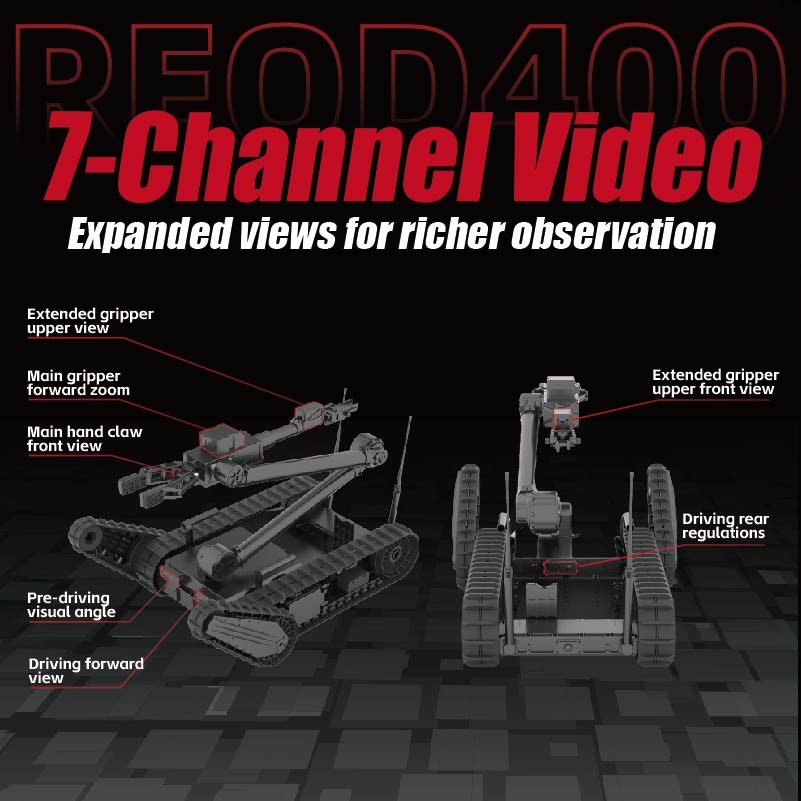
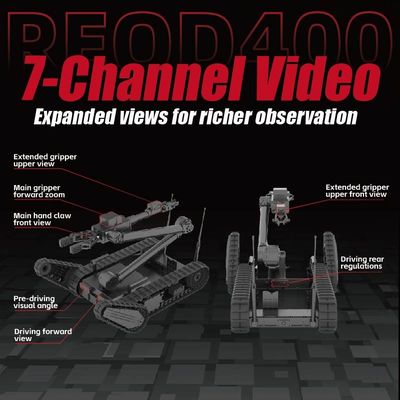
Σύστημα απεικόνισης προσαρμοσμένου στη λειτουργία ∙ Επτά θέσεις κάμερας για βελτιωμένη παρατήρηση
Το σύστημα απεικόνισης του ρομπότ λειτουργεί ως τα μάτια του χειριστή.σημαντική βελτίωση της ικανότητας των χειριστών πρώτης γραμμής να αντιλαμβάνονται απομακρυσμένα περιβάλλονταΟ σχεδιασμός του συστήματος 7 καμερών δεν είναι μια απλή διάταξη, αλλά μάλλον βελτίωση και βελτιστοποίηση με βάση τα προβλήματα που αντιμετωπίζουν οι χρήστες κατά την πραγματική χρήση.
Το σύστημα απεικόνισης χωρίζεται γενικά σε τρεις συνδυασμούς εικόνων: κατάσταση οδήγησης, κατάσταση κύριας λαβής και κατάσταση επεκταμένης λαβής.Αυτόματα αλλάζει μεταξύ αυτών των τρόπων με βάση τις τυπικές εργασίες όπως η οδήγηση, αιχμαλωτίζοντας και παρατηρώντας, προσφέροντας ισχυρότερη απόμακρη περιβαλλοντική επίγνωση και ένα πλουσιότερο φάσμα γωνιών παρατήρησης.
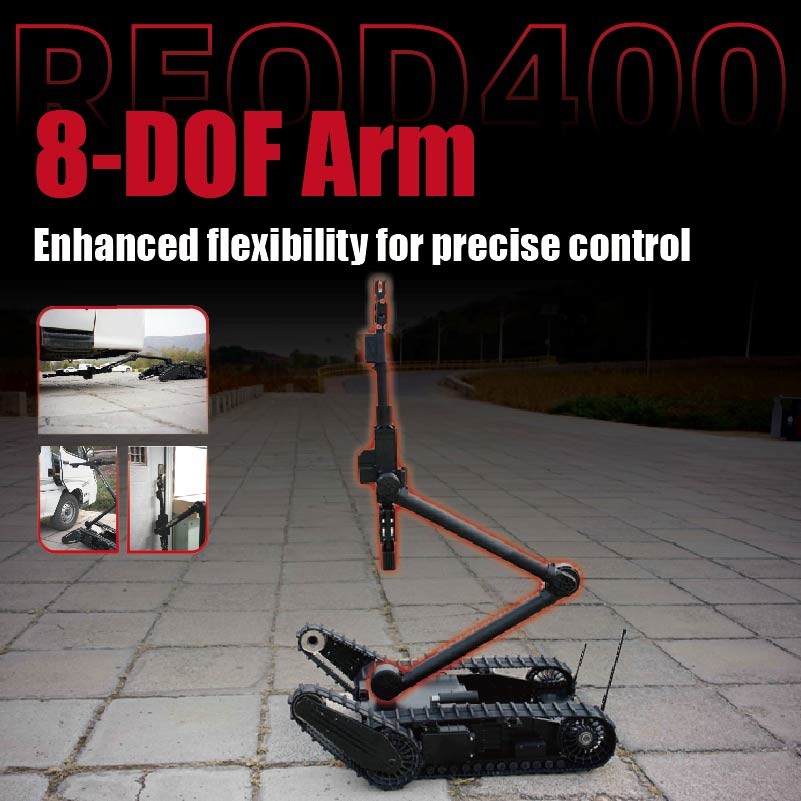
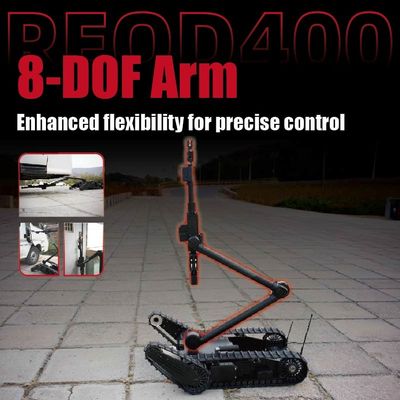
Σχεδιασμός ενσωματωμένου ρομποτικού βραχίονα με οκτώ βαθμούς ελευθερίας
Ο ρομποτικός βραχίονας REOD400 διαθέτει ολοκληρωμένο σχεδιασμό 8 βαθμών ελευθερίας, παρέχοντας ισχυρές χωρικές δυνατότητες.Αυτό το σχέδιο επιτρέπει στο ρομποτικό χέρι να εκτελεί όχι μόνο συμβατικές εργασίες εξόντωσης βόμβων αλλά και εργασίες που τα συμβατικά ρομπότ εξόντωσης βόμβων με 5 ή 6 βαθμούς ελευθερίας δεν μπορούν να χειριστούν, όπως η άρση αντικειμένων σε υψηλά, χαμηλά, βαθιά λάκκους ή περιβάλλοντα επιτραπέζιου επιπέδου, καθώς και η διεξαγωγή αναγνώρισης πολλαπλών γωνιών σε υψηλά, χαμηλά και βαθιά περιβάλλοντα λάκκων.
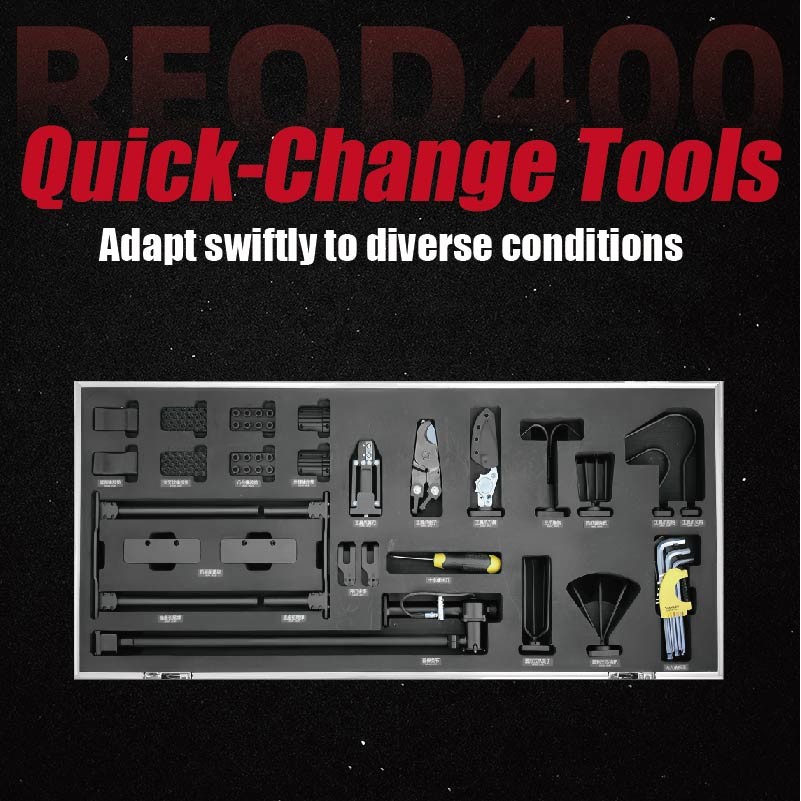
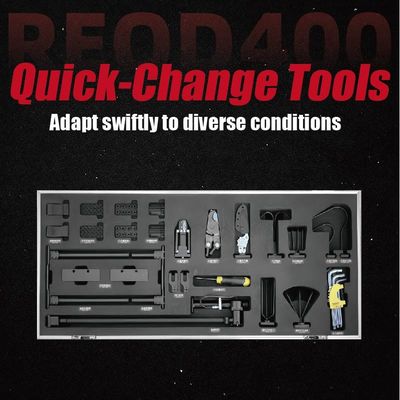
Πολυδιάστατο Σύστημα Εργαλείων Γρήγορης Αλλαγής
Το ρομπότ REOD400 είναι εξοπλισμένο με 18 τύπους "εργαλείων γρήγορης αλλαγής", συμπεριλαμβανομένων 6 συνόλων εργαλείων λαβής, 6 βασικών συνόλων εργαλείων και 6 εκτεταμένων συνόλων εργαλείων,που επιτρέπουν την ταχεία αντικατάσταση των "σετ εργαλείων λαβής" με βάση διαφορετικά λειτουργικά καθήκοντα και τους τύπους και τα σχήματα των διαφόρων επικίνδυνων αντικειμένων, ικανοποιώντας έτσι τις ποικίλες λειτουργικές ανάγκες των χρηστών.
Εφαρμογές
Γκαλερί εικόνων
Τεχνικές παραμέτρους
|
Πλατφόρμα ρομπότ |
|
|
Μέγεθος |
≤ 830×600×460mm ((Πλήρως αποθηκευμένο) |
|
Βάρος |
≤ 37kg (περιέχει δύο σετ μπαταριών) |
|
Μέγιστη ταχύτητα |
≥ 1,8m/s ((5 ταχύτητες, συνεχώς μεταβλητές) |
|
Πάνω από την Ικανότητα Εμποδίου |
≥300 χιλιοστά |
|
Πέρα από το πλάτος του αυλαίου |
≥ 400 χιλιοστά |
|
Δυνατότητα βαθμολόγησης |
≥ 45° |
|
Ανέβασε σκάλες |
≥ 45° |
|
Διάρκεια ζωής της μπαταρίας (φυσιολογική θερμοκρασία) |
≥ 2 ώρες |
|
Αξία IP |
Διάκριση IP66 |
|
Δυνατότητα άρσης του ρομποτικού χεριού |
|
|
Επεκτεινόμενη κατάσταση |
≥6kg |
|
Κράτος που έχει αποσυρθεί |
≥ 16kg |
|
Κραυλάκια |
2 |
|
Μετακινούμενες αρθρώσεις |
8 |
|
Μέγιστο ύψος παρατήρησης |
≥2400 χιλιοστά |
|
Μέγιστο ύψος πρόσφυσης |
≥1700 χιλιοστά(Κύρια νύχια), ≥2000 χιλιοστά(Αντι-κλεφτήρας) |
|
Μακρύτερη απόσταση άρσης |
≥1380 χιλιοστά(Κύρια νύχια),≥ 1650 mm(Αντι-κλεφτήρας) |
|
Μέγιστο πλάτος ανοίγματος της λαβής |
≥160 χιλιοστά |
|
Φορητός ελεγκτής |
|
|
Μέγεθος |
≤360 × 210 × 70 mm |
|
Βάρος |
≤2kg ((Χωρίς σακίδιο) |
|
Εικόνα εμφάνισης |
10.1'' LCD |
|
Εμφάνιση βίντεο |
7 κανάλια |
|
Μέθοδος λειτουργίας |
Δύο τρόποι λειτουργίας του κυλιόμενου κουμπιού και της οθόνης αφής |
|
Μέθοδος ελέγχου |
Διοίκηση με καλώδιο ≥ 100m ((Κανονικό καλώδιο),Ασύρματο έλεγχο ≥ 1000m ((Εξωτερικό) |
Επικοινωνήστε μαζί μας
Κυρία Έιμι.
E-mail:amy-huang@mysmech.com
Συνιστώμενα προϊόντα